This is my first attempt in building a brushless gimbal. Most of the parts like the clamps and carbon fiber tubes are from a Tarot FY680 Hexa. I will then custom fabricate the remaining parts from 5mm and 3mm sheets of 6061 T6 aluminum. The brain of the gimbal is a v3 Martinez BL controller flashed with v1.3 AlexMos firmware.
The core of the electronics needed for this brushless gimbel are:
- Martinez brushless controller v3 flashed with v1.3 AlexMos firmware
- Tiger Motor 4006 120t (GB4006-120)
- Castle Creation BEC Pro
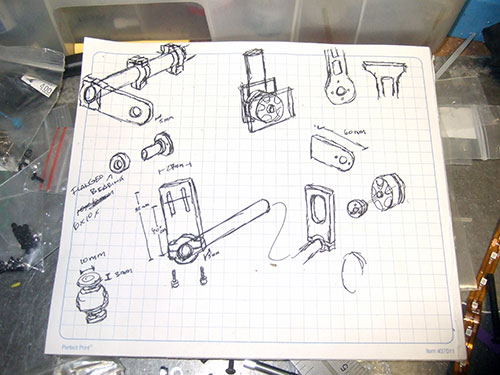
I started off with some mock up drawing of the different parts of the gimbal.
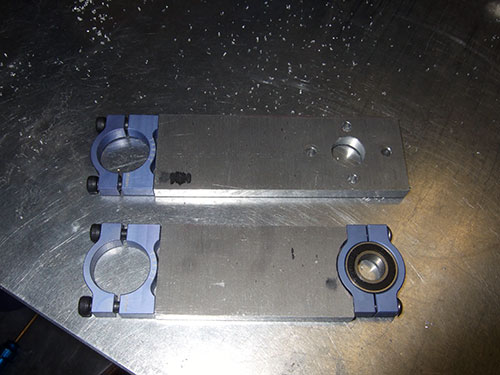
Here are a set of arms made from .19" (about 5mm) thick 6061 T6 aluminum. The blue clamps are from my FY680 Tarot Hexacopter. The bearing came off my HPI Baja 5T, it just happen that the wheel bearings has a 16mm outer diameter.
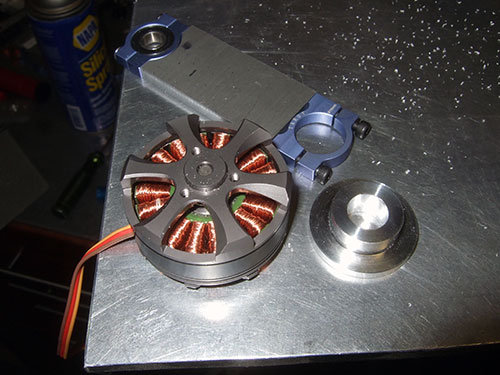
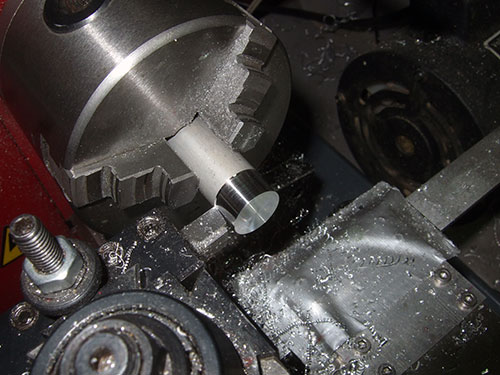
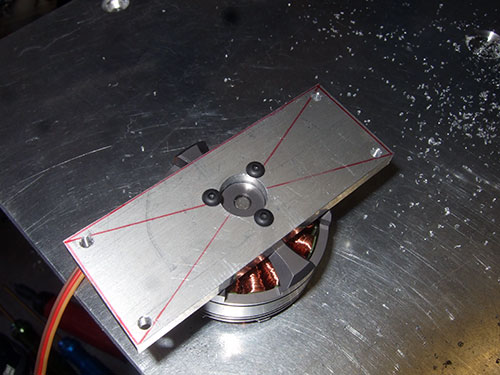
Next I took an aluminum stock and made a hub that fits over the brushless motor so I could adjust the height of the camera mount.

The hub is on the right and that is how it looks after I finish cutting it on the lathe.
Here is the finished hub with all the holes drilled out.

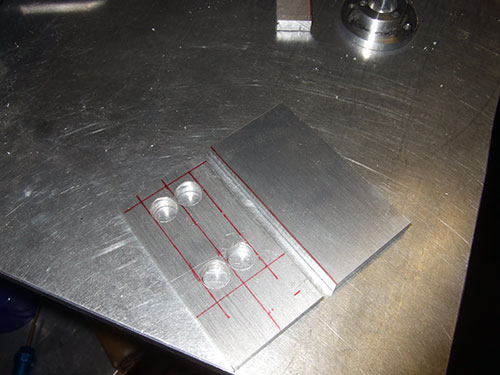
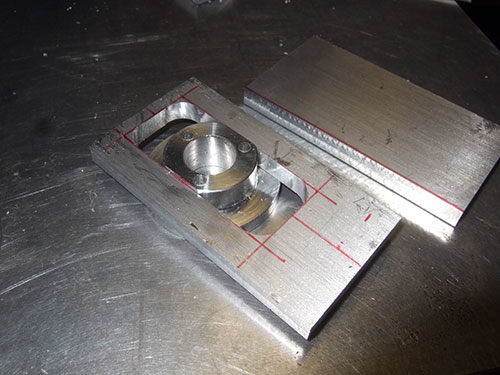
In this picture is the beginning of the adjustable camera mount. Once again I used .19" thick 6061 T6 aluminum. I drill the 4 hole and cut out the center so I can save some time on the mill.
All cleaned up with the mill.

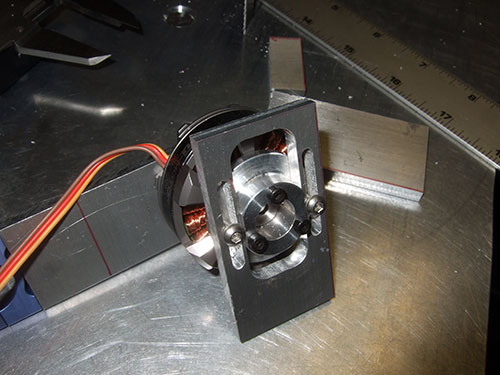
Test fitting to make sure the hub fits and moves smoothly.
Milled out the two slots so the hub could be tighten.
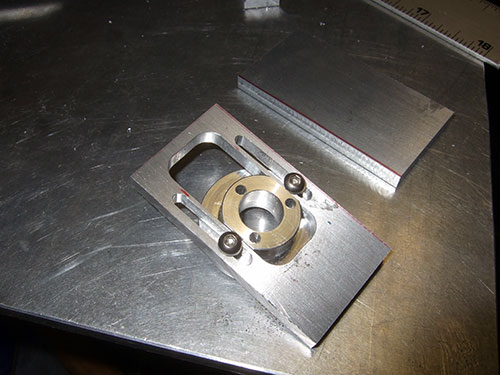
Test fitting the parts.
Now I need to work on the other side of the camera mount. I started off with a round 7075 Aluminum stock.
The smaller hub that goes inside the bearing.

The completed hub with a 5mm screw on the end.

Test fitting the hub and the slot.

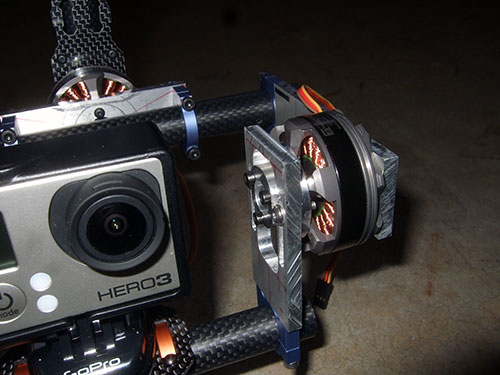
This is the roll axis motor and plate that clamps on the a 16mm carbon fiber tube.
All the parts put together to make sure everything fits and moves smootly.




|